We have been developing Omni drive for many years and have seceded. The
problem is that we could not find students that could drive it. The mixing
control program was not sensitive and the students had trouble making short
turns (to set a item on goal). They also had trouble keeping track of all the
directions they that they could go. At that time we used the trigger button to
go from rotate to tank style drive. The best control set up was two joysticks mechanically tied
together. The left controller would mix and control the left two drives motors
and the right controller would mix and drive the right motors. The mechanical
tie would not allow the joy sticks to move apart or together but forward and
back or side ways. So using this method was easy to program and what you could
do is go forward, back, rotate, sideways and angle. We used the drives on a 45
degree angle to front and back to make use of four wheel drive in forward and
reveres. On angles it would only be two wheel drive. Below are two different
styles.
Above are two joysticks and if you install the above piece (we made
out of plastic) into the handle , it allows the two joysticks to go forward and
back , but only allows them to go sideways together. Doing this with a simple
mix program that is already in the program, you can copy and past for the second
joystick mix program, you can use tank style driving but get all the directions
of omni drive.
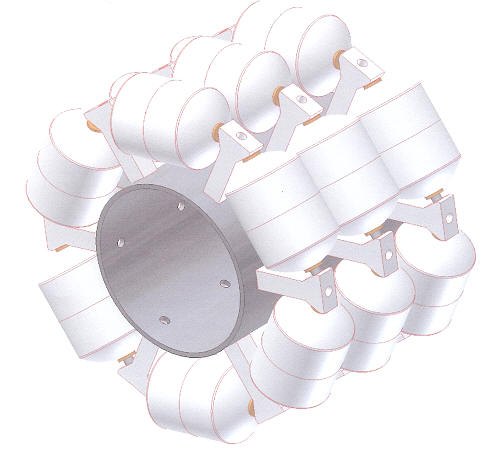
Above: The motor is mounted inside the
wheels for each drive. The wheels have a longer length and the use of four rows
give more traction.
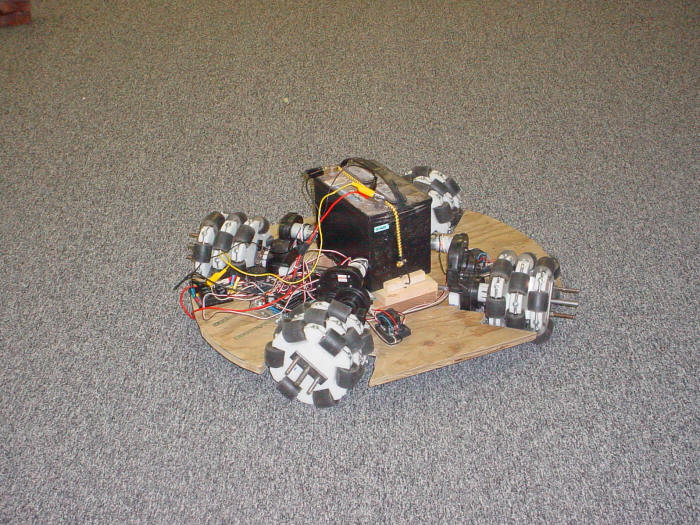
Above: We C&C plastic (HDPE) and snapped the wheels into place. Each unit
has two rows of wheels, one in front and one in back. With two of these units at
each drive location that would be equal to four wheels at each drive giving a
good amount of traction. Their is a lot of pushing power and of course lots of
control. The system will go up ramps but only in a angle
direction. We have developed a easy suspension that would allow for ramp use in
any direction. If you have questions contact us
jkweber@charter.net
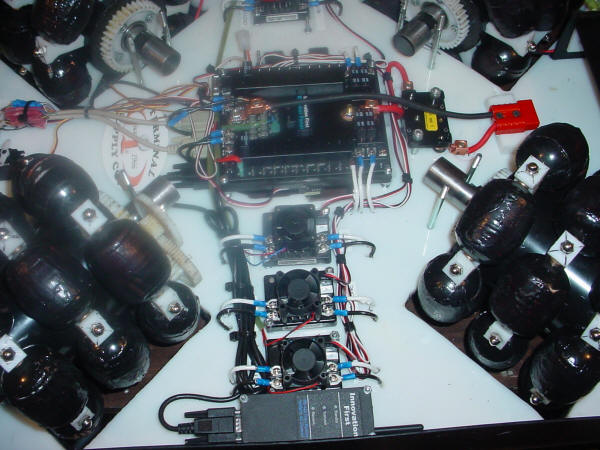
Above, the motor you see will slide into the cylinder which has the supports
for the omni wheels. The triangle plate on the motor has bearings and then a
bearing will slide over the tube on the end of the motor. The slot in the tube
allows for contact of the gears to the motor gear. We used a 1/4 in rod for the
axel with brass bearing collars. The omni wheels are PVC caps glued together and
lathed for the curve. The white support was changed to aluminum on the final
robot. We used this omni design on the 2005 robot. With the motors inside the
wheels it left us with allot of space. Notice How the wires from the PWM go
through the white base, we routed them in slots in the HDPE between the white
and a top layer of Black HDPE. Yes the electrical was upside down in the robot.
Above drawing, the wheels are actually staggered. The robot is a very fast robot and the work effort of the motors is very low.
They are not fighting each other at all.
Above: A new design for our omni drive
Omni Drive, Fast, a lot of power (if with many wheels), rotates quick, can go
any direction, programming can be a challenge, Must have a talented
driver. If not designed perfect it is hard to control.
The Mecanum wheel is one design for a wheel which can move in any
direction. It is sometimes called the Ilon wheel after its Swedish inventor,
Bengt Ilon, who came up with the idea in 1973 when he was an engineer with
the Swedish company Mecanum AB.
It is a conventional wheel with a series of rollers attached to its
circumference, these rollers having an axis of rotation at 45° to the plane of
the wheel in a plane parallel to the axis of rotation of the wheel. As well as
moving forward and backward like conventional wheels, they allow sideways
movement by spinning wheels on the front and rear axles in opposite directions.
Below: Wheels by Andy Mark. To view these and other omni wheels visit
http://andymark.biz/
We are currently using the standard four wheeled drive system but have
omni wheels in the rear. In this configuration the arm is located above
the front solid wheels to make the axes turn at the arm so we can have more
control of the claw. With the claw so close to the turn axes it does not move
very far in a turn thus allowing for more control.
Remember, any claw will work, it's how well you build it. (get the bugs
out)
The above Idea proposed by Pat Major of the
Goodrich Martins allows for easy
turning but stops other robots from spinning your robot so easily when hit from
the front or rear side.
Standard two wheel drive with casters. Easy to build and drive, can be
fast.
Four wheel drive and Six wheel drive, takes a lot of power to turn so you
will loose high speed unless you install a two speed gear system which can give
you trouble if you don't get it perfect.
Two wheel drives that rotate, casters in rear. Easy to drive , not bad to
program. can go all directions including sideways. Limited traction, can be
pushed sideways.
Four wheel drive that all wheels rotate together, the arm would have to
rotate with the drives to make it work. Easy to program easy to drive, a lot of
traction and stable. can go any direction. Good for many jobs. Click
IDEAS for more information
Four wheel drive that all wheels rotate separate, you can go straight and
angle or rotate. good traction, hard to set up, hard to program, hard to get the
controls right for easy driving. Can go any direction including rotate.
Tank track, Tank track with drop down casters for turning. Can out push
another robot but is limited on its speed. Even with two speeds it will not turn
quick. Drop down caster will help but added engineering required. Good for
a specific job.
All drive: All wheels across the bottom of the robot drive and rotate.
An idea not solved but has a lot of potential. Click
IDEAS for more information